遊星歯車設計のポイント
F1. はじめに
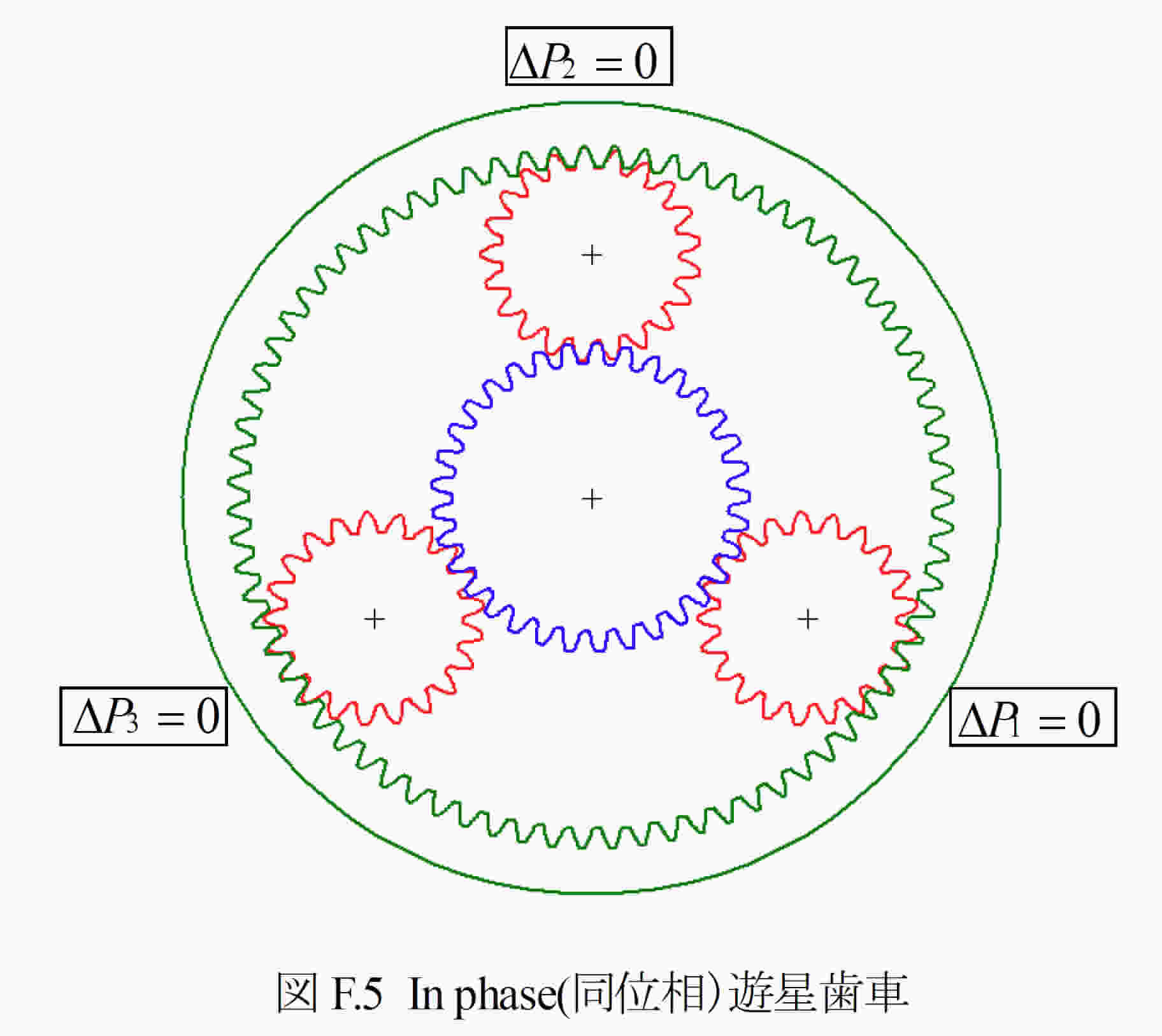
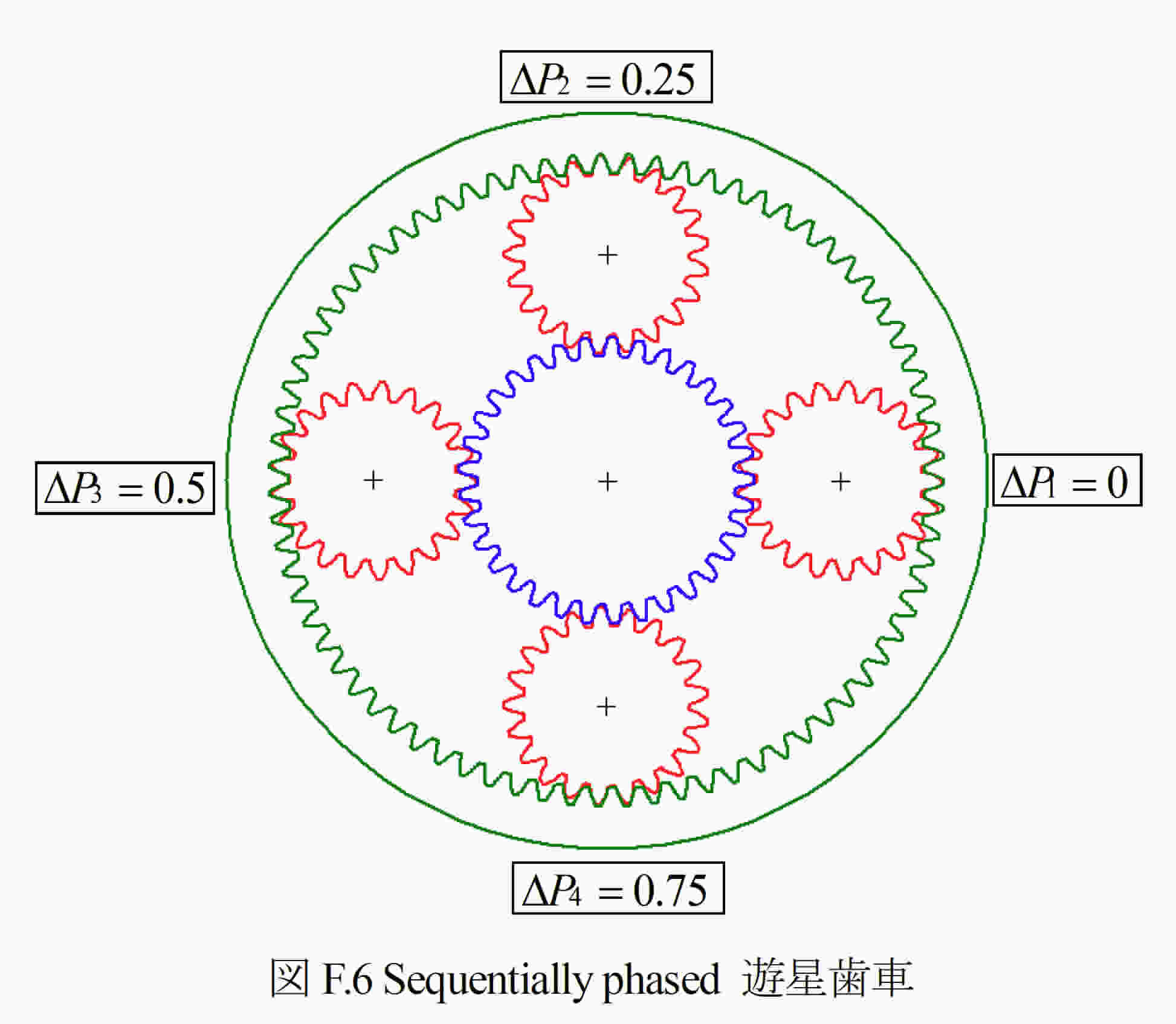
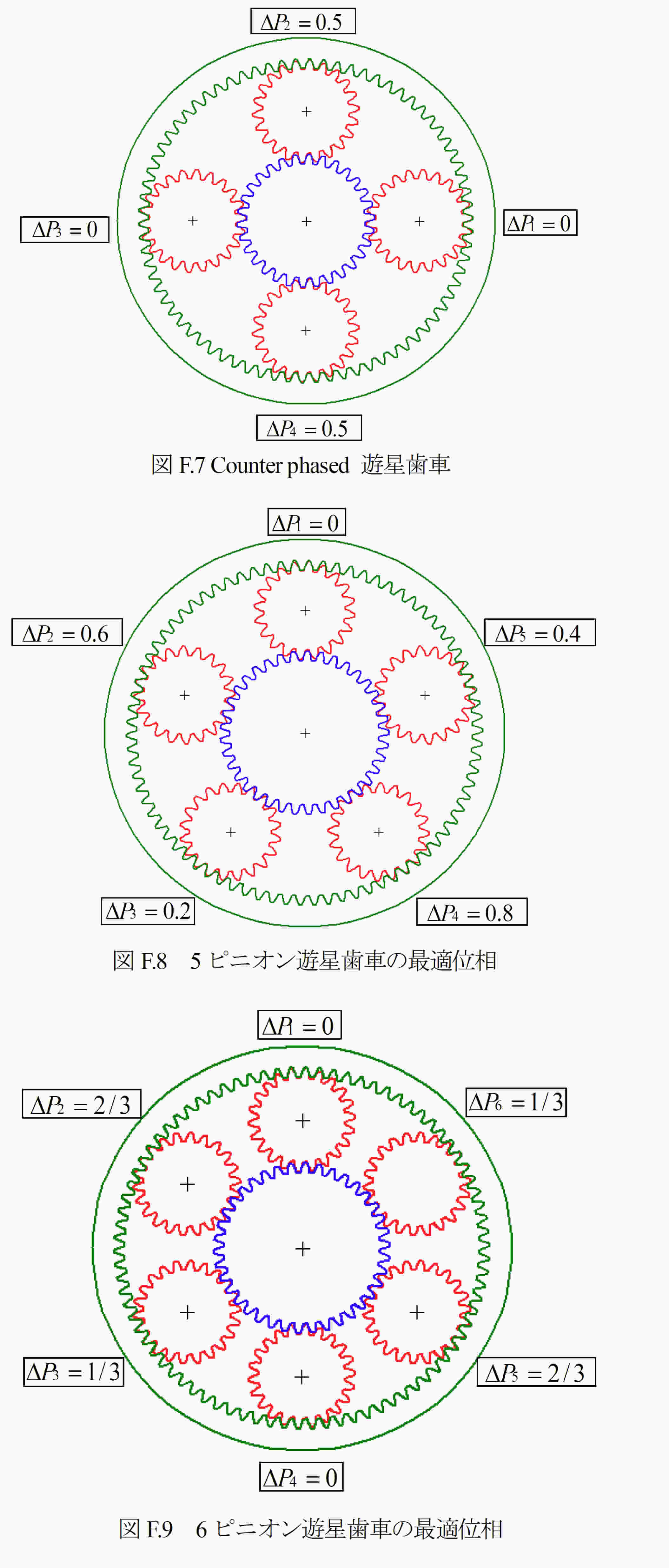
遊星歯車は,サンギヤと複数個のピニオンおよびリングギヤから成る一種のギヤシステムであり,各ピニオン位置のかみ合いに位相を持たせることで,振動あるいはノイズ特性をコントロールすることができる.このかみ合い位相は,サンギヤ歯数,リングギヤ歯数とピニオン個数によって決まる.
ここでは,かみ合い位相の種類とそれによる遊星歯車の振動騒音の特徴を整理して説明する.遊星歯車設計時の検討ポイントとして活用いただければ幸いである.
F2. 概要
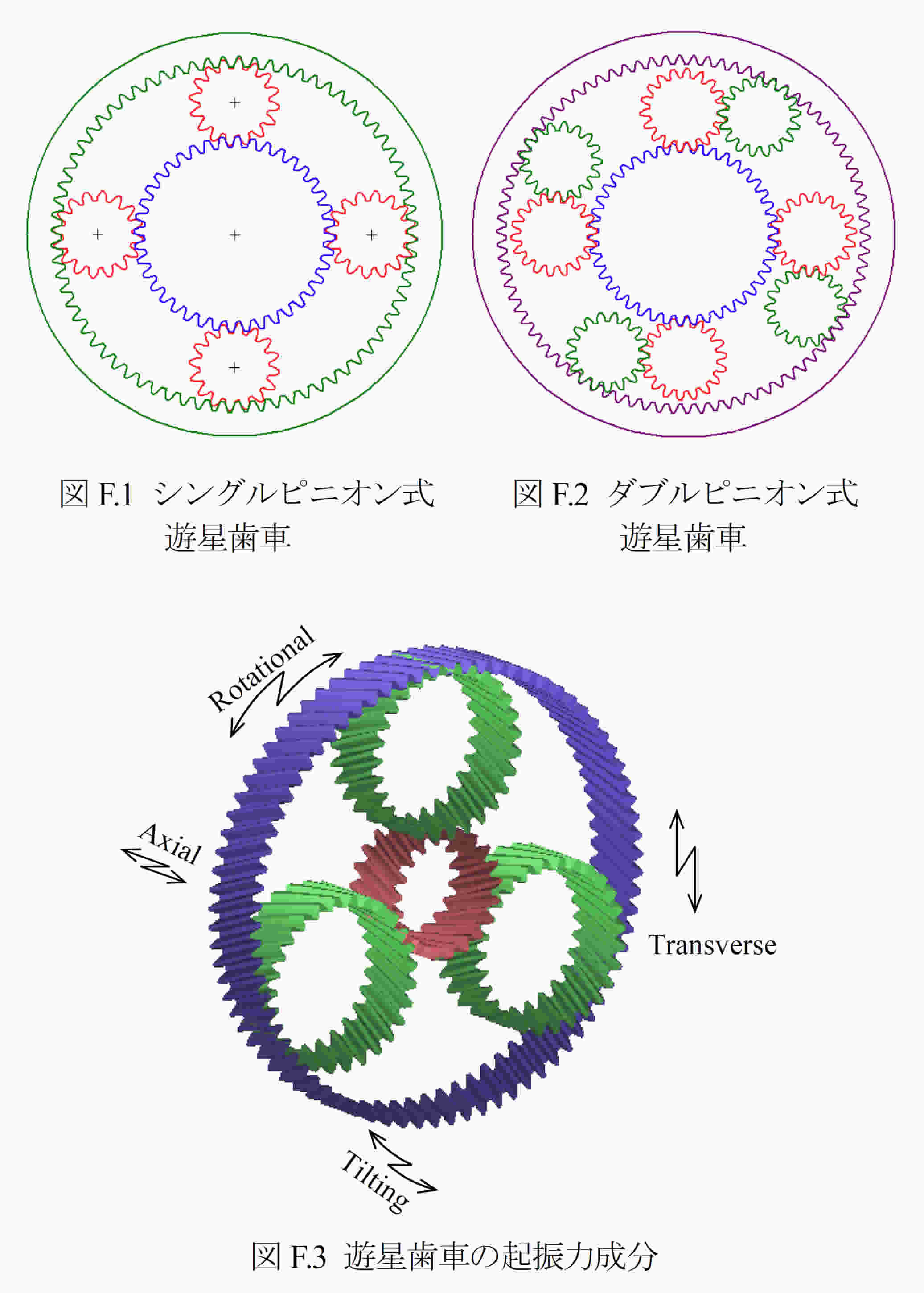
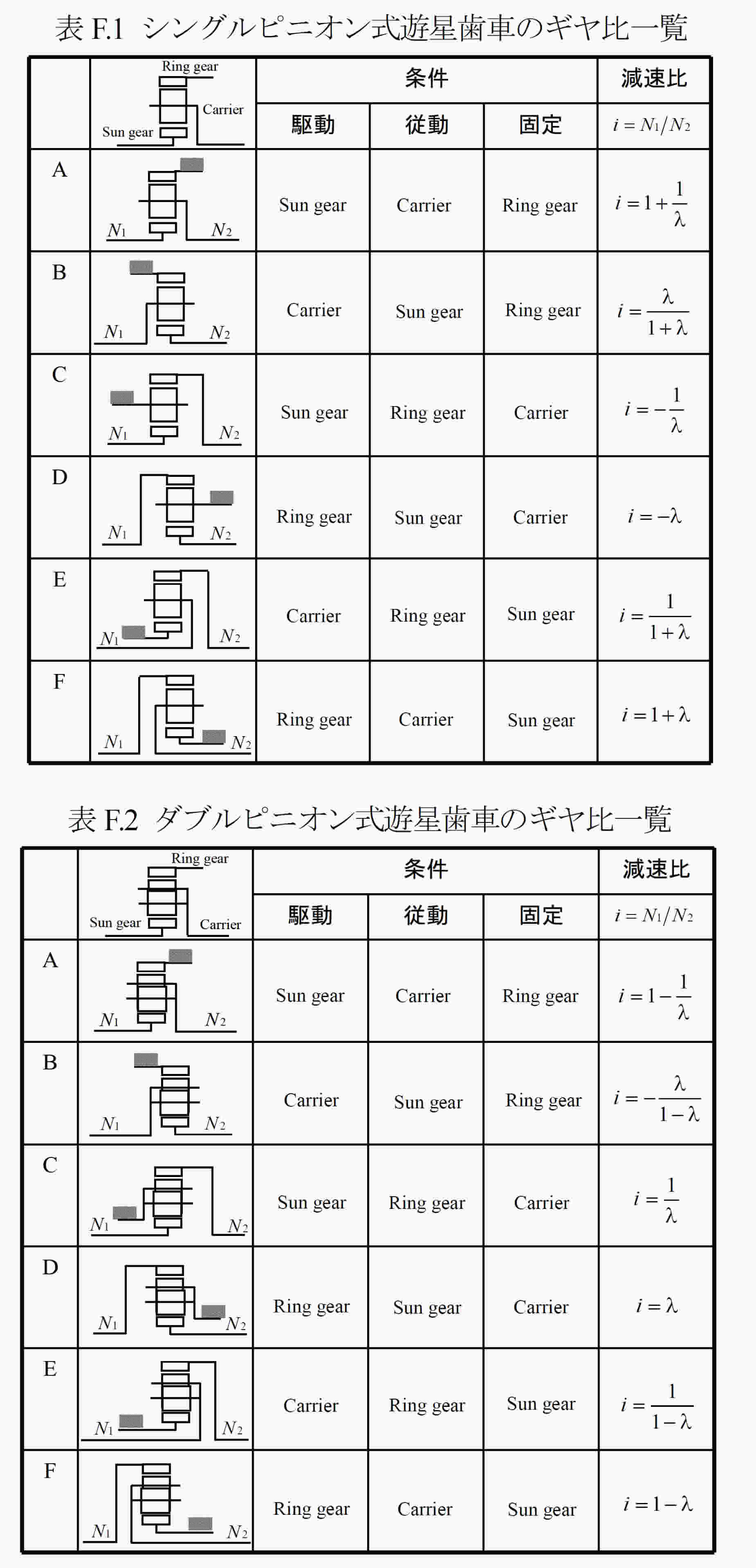
遊星歯車機構は,シングルピニオン式遊星歯車(図F.1)とダブルピニオン式遊星歯車(図F.2)が基本となっている.自動車用自動変速機は,これらを組み合わせた複合遊星歯車として多段変速を実現している.この基本となるシングルピニオン式遊星歯車とダブルピニオン式遊星歯車について,サンギヤ歯数,リングギヤ歯数とピニオン個数とかみ合い位相の関係およびかみ合い位相と遊星歯車の起振力の関係を以下に整理する.なお,遊星歯車の起振力
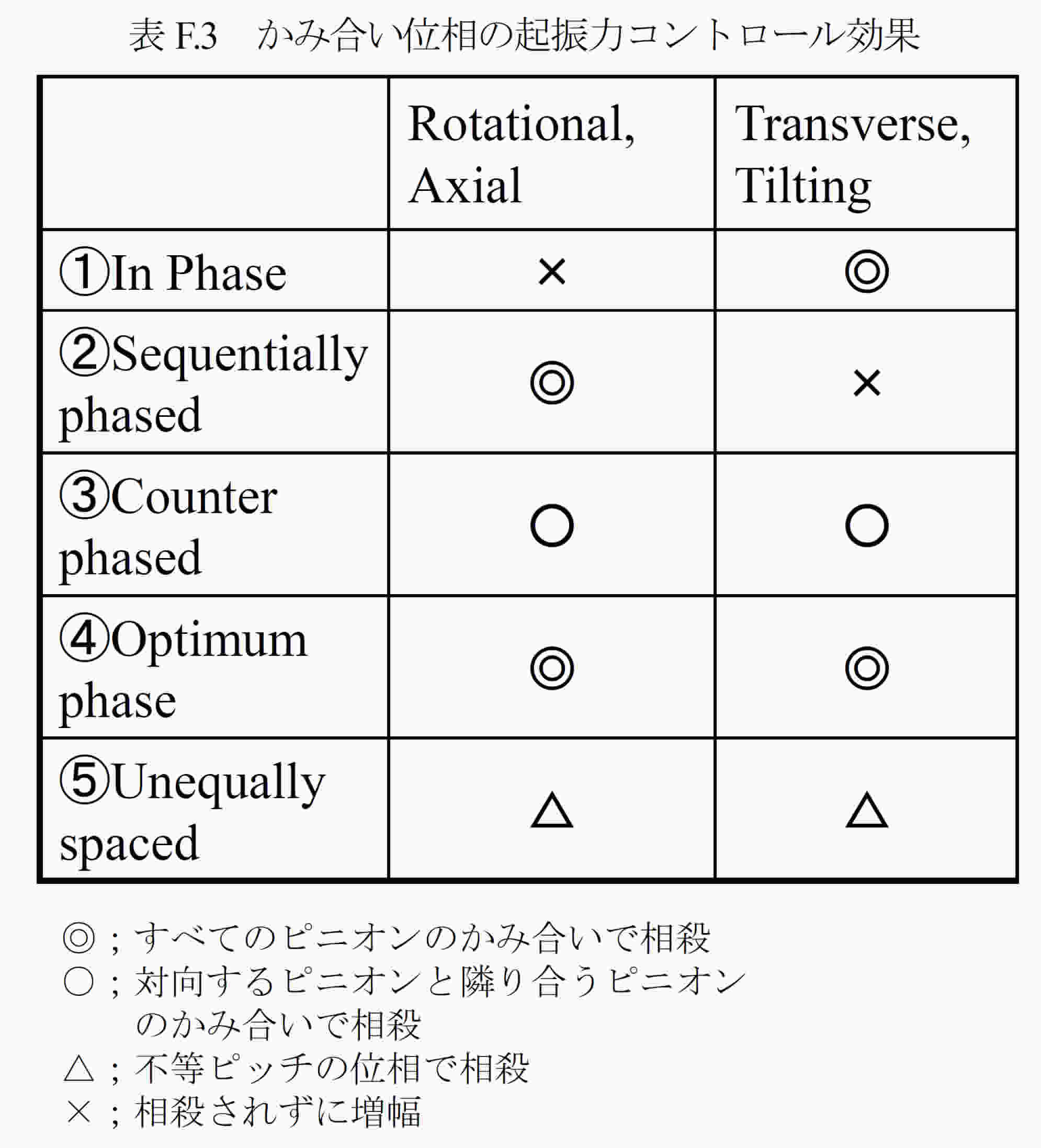
は,図F.3に示すように回転方向(Rotational),半径方向(transverse),軸方向(Axial)と倒れ方向(Tilting)の4 つの方向の成分を持つ.かみ合い位相によりこれら4つの方向の成分がそれぞれ影響を受けることになる.
本論に入る前に,遊星歯車の基本運動式とギヤ比について示す.遊星歯車の3つの回転要素の回転(サンギヤ回転Ns ,キャリア回転Nc,リングギヤ回転Nr)は,次式により関係づけられる.
これが基本運動式である.
①シングルピニオン式遊星歯車
(1+λ)Nc=Nr+λNs (F.1)
②ダブルピニオン式遊星歯車
(1-λ)Nc=Nr-λNs (F.2)
ここに, λはサンギヤ歯数Zsとリングギヤ歯数Zr の比で
λ=Zs /Zr<1である.
式(F.1),(F.2)から3 つの回転要素のいずれかを固定,いずれかを入力,残りを出力とすることであるギヤ比が求まる.表F.1および表F.2は,シングルピニオン式遊星歯車とダブルピニオン式遊星歯車のギヤ比を運転条件に合わせて整理したものである.
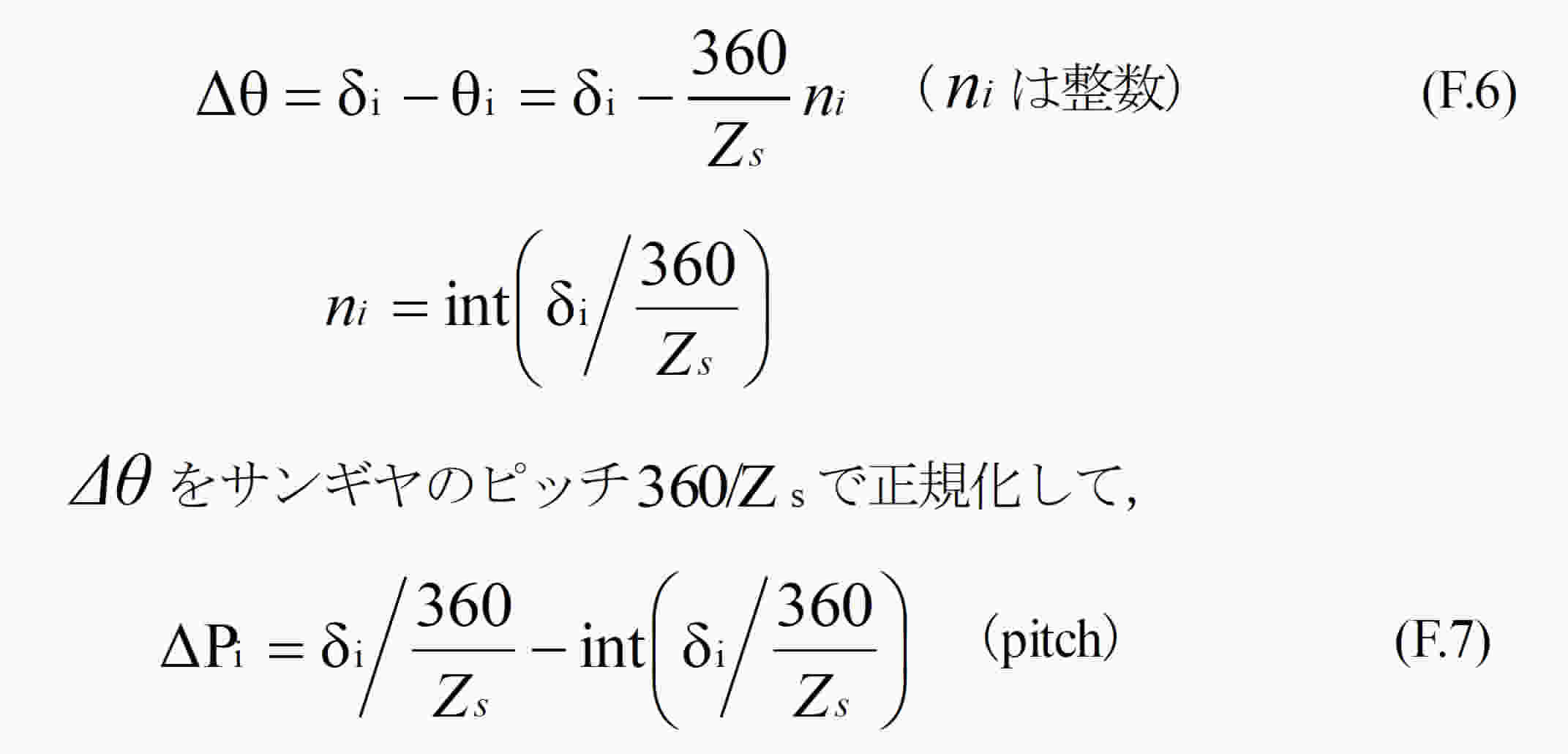
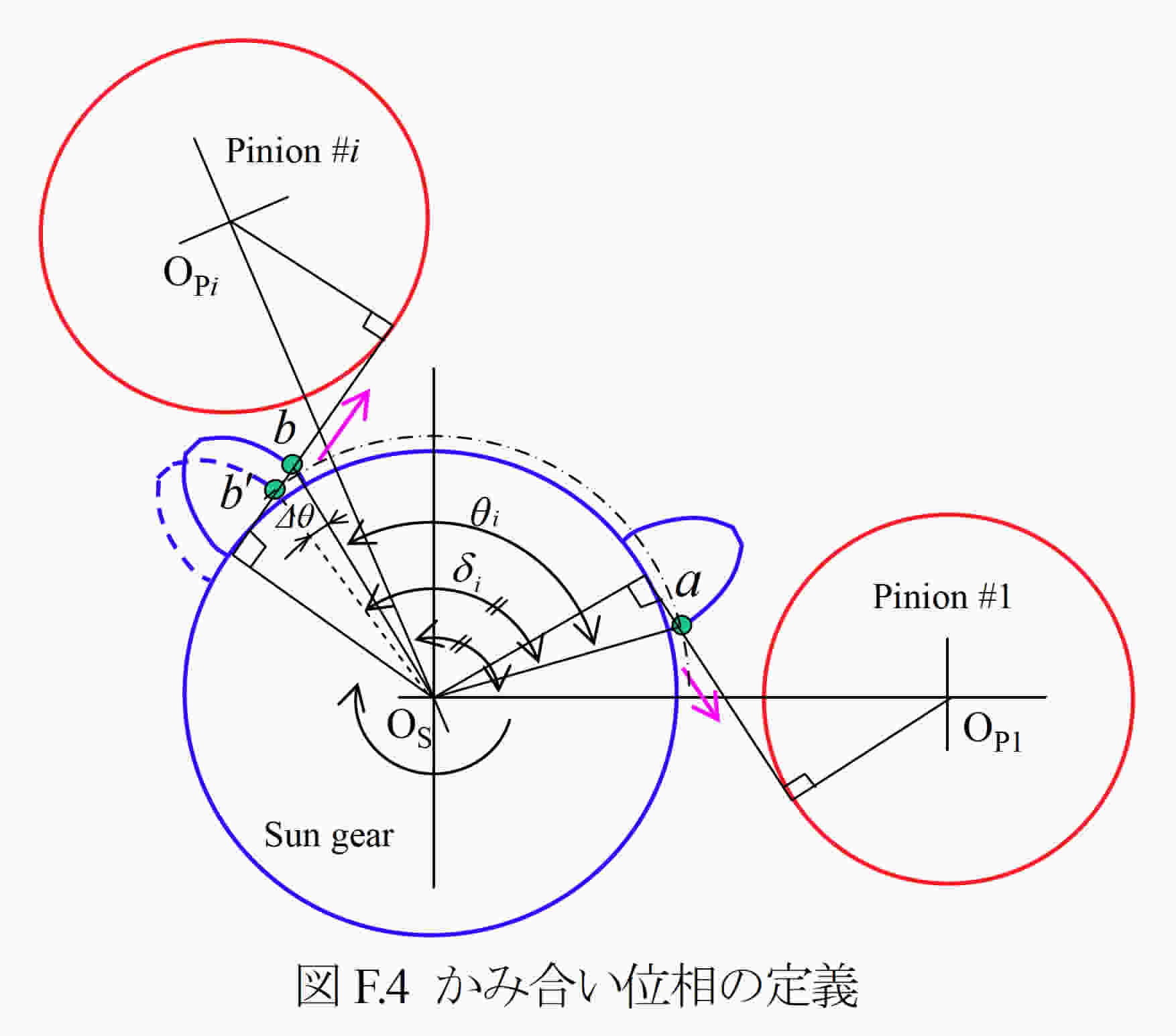
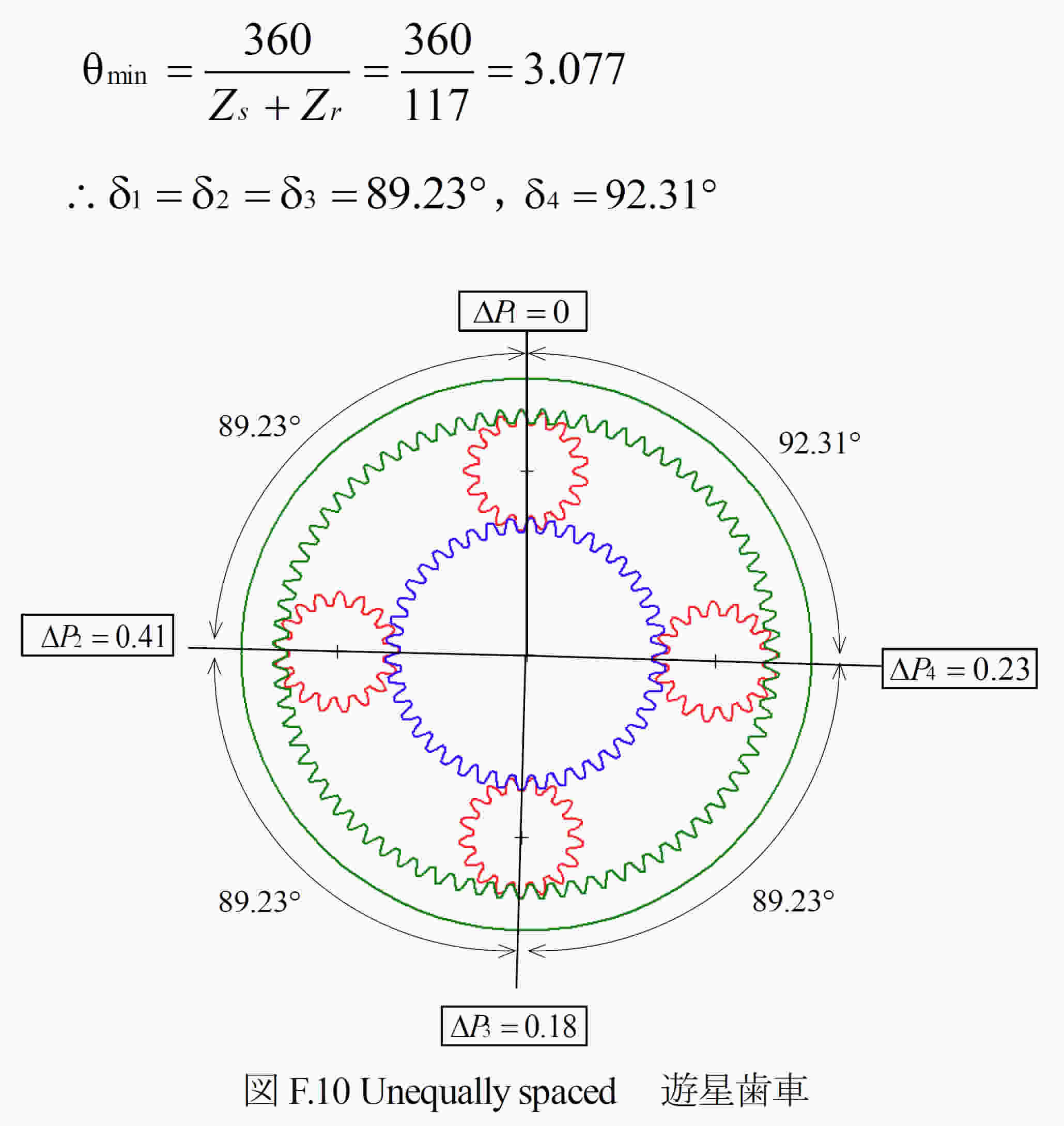
F4. 遊星歯車の配置角
ピニオンの配置角δは,サンギヤ歯数Zs,リングギヤ歯数Zrとピニオン個数kp
AMTEC www.amtecinc.co.jp