design system(遊星&不思議遊星)

5.1 概要
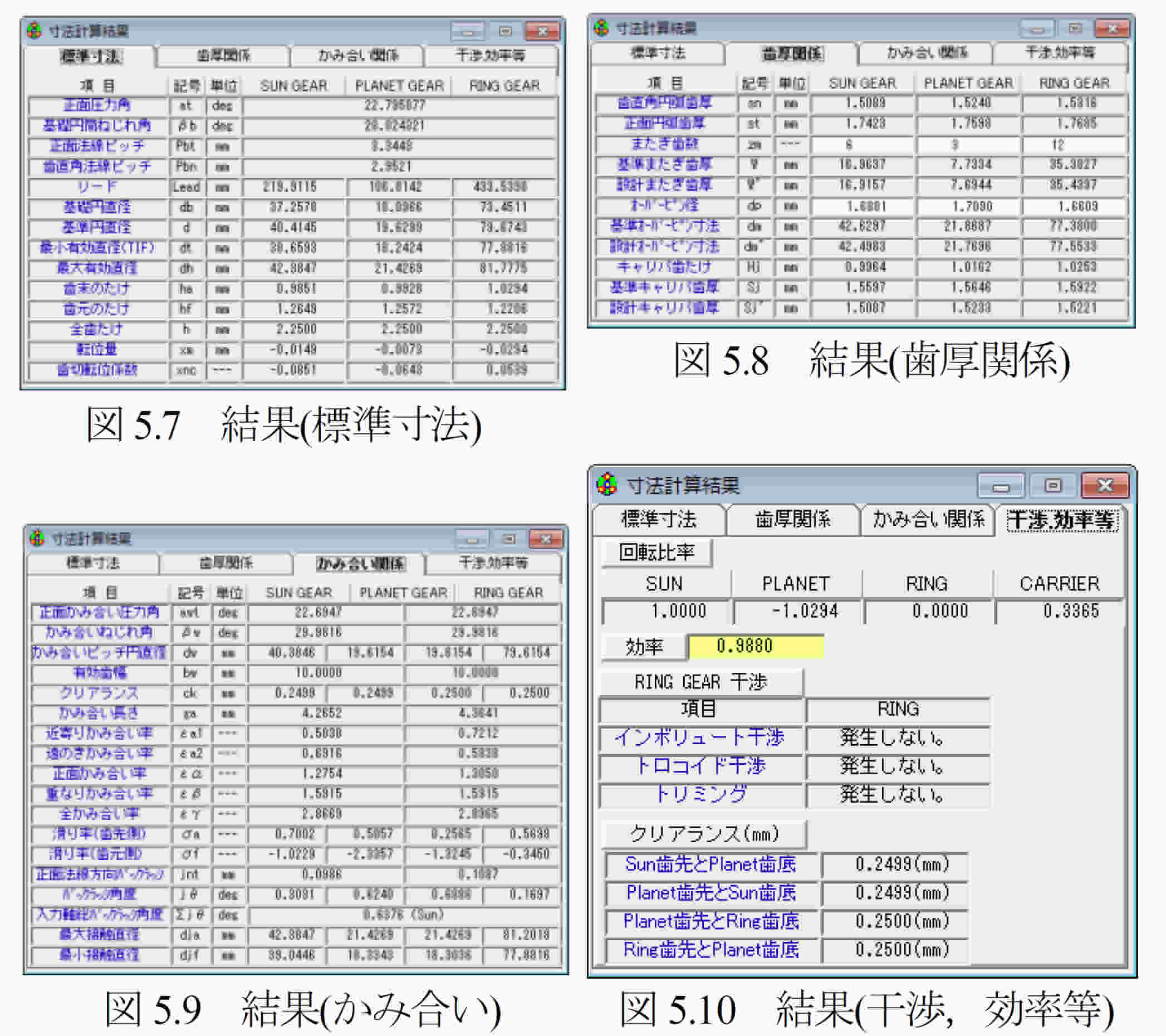
Planetary gear and Mechanical paradox gear design systemは,2016年12月に操作性や画面表示など改良した「Planetary gear design system」に変わりました.本ソフトウェアは,遊星歯車と不思議遊星を簡単に設計できるソフトで,歯数の組み合わせや中心距離などを自動決定し,歯車寸法および歯車強度を簡単に設計することができます.また,遊星歯車の干渉チェックおよび,転位係数の決定,効率計算なども簡単に計算することができます.図5.1に計算結果の全体画面を示します.
5.2 適用
(1)型 式 :等配置型
:遊星(プラネタリ,ソーラ,スター)
(2)歯車材料 :金属,樹脂(金属と樹脂混同可能)
(3)歯車歯形 :インボリュート歯形
(4)オプション :不思議遊星(3K),少歯数,ダブ
ルピニオン,不等配置
上記,遊星歯車の歯車寸法,歯車強度,歯形設計に適用します.
5.3 プロパティ(基準ラック)
プロパティで,歯先円直径の決定方式,基準ラック,モジュールまたは中心距離基準,歯車精度,摩擦係数の設定をします.
図5.2にプロパティの画面を示します.
5.4 遊星歯車機構の選択
図5.3に示す遊星歯車タイプの選択をします(プラネタリー型,ソーラー型,スター型の増減速,不思議3K).


(1) 遊星歯車の個数は,1~21です.
(2) 歯数は,直接入力する方式と,速比から計算した歯数一覧(図5.5)から選択す
る方式があります.
(3) 中心距離よりモジュールの計算,またはモジュールより中心距離の計算をす
ることができます.
(4) 転位係数の計算は,モジュールと中心距離からバックラッシが0になるように
計算します.
(5) 法線歯厚減少量の入力.(デフォルト値としてJISバックラ ッシ標準中間値の
1/2を表示します.)
(6) 歯先円直径はプロパティで設定した基準ラックの歯たけと転位係数から
標準値を計算しますが,変更が可能です.
(7) 外歯車の歯元部の形状は,基準ラックによる創成運動によって生成する歯
形です.内歯車の歯元は,入力R接続です.
(8) 歯車の歯先はRで作成することができます.
(9) 転位係数は,1種を変更すると残りの転位係数が連動して変化しますが,歯
車それぞれ個別に入力することができます. 最適なクリアランス(歯たけの調
整)と歯厚(転位係数の調整) の決定のため図5.6の歯厚,頂げき確認(補助設定)
によって歯形を確認することができます.また,この画面によって,転位係数や歯
先円直径を変更したきの歯形形状やクリアランス,干渉の確認をすることができ
ます.この時点での歯形は歯面のみであり歯元形状は含まれていません.
AMTEC www.amtecinc.co.jp