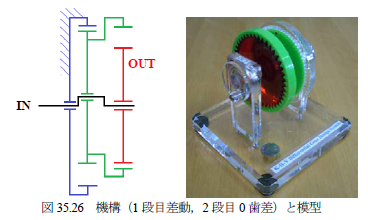
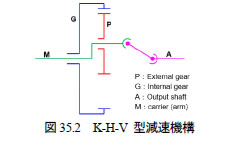
35.1 概要
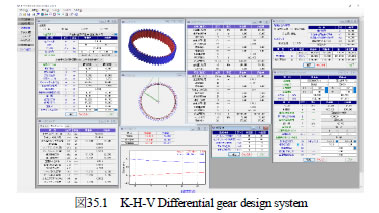
K-H-V Differential gear design systemは,図35.2に示す減速機構です.インボリュート歯車の差動減速(増速)機構設計(歯数差0,1,2 の3種類)ソフトウエアであり歯形設計,歯のかみ合い,すべり率,歯車強度計算をすることができます.歯数差が小さい場合,転位係数0の標準歯車で設計するとインボリュート干渉等が発生しますが,本ソフトウエアでは,かみ合い率が1以上で且つ,干渉が発生しない転位係数の組み合わせの歯車を計算することができます.なお,トロコイド曲線を有する差動歯車ソフトウエアは,カタログ[34]をご覧ください.
35.2 初期設定
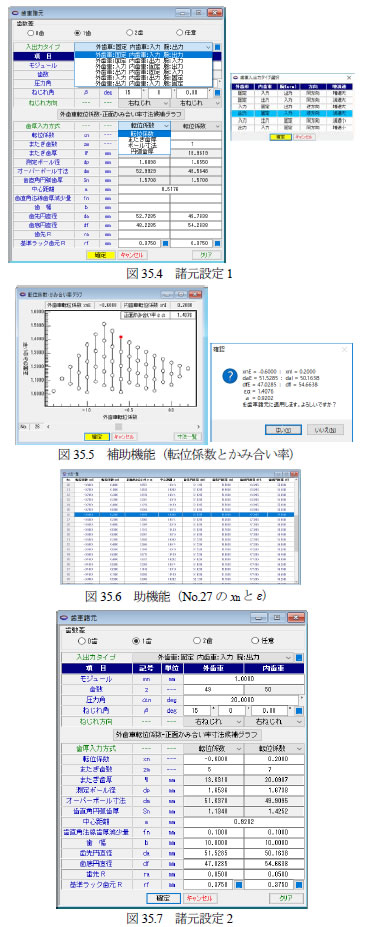
図35.3に示すように,基準ラックの設定を行い,補助機能として設定した基準ラックの実寸法を表示します.

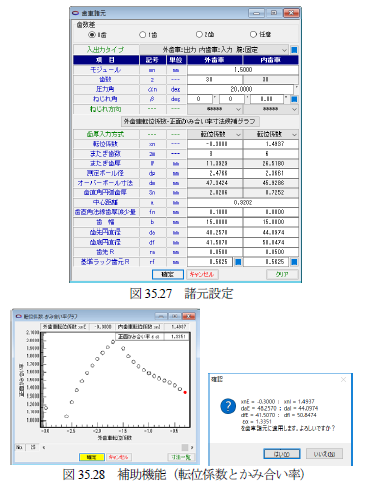
図35.4に示すように,歯数差(1歯差,2歯差,0歯差)を選択し,次に,組み合わせ(腕の固定/入力/出力)を選択します.歯数差が0の場合は,腕(arm)を固定として歯形を作図します. 図35.4でmn,z,αn,β入力した後,転位係数(xn)を設定しますが,転位係数の与え方は無数に存在しますので図35.3の補助機能を使用して,かみ合い率1以上で且つ,インボリュート干渉が発生しない組み合わせを決定します.本例の場合,55個を表示し
AMTEC www.amtecinc.co.jp