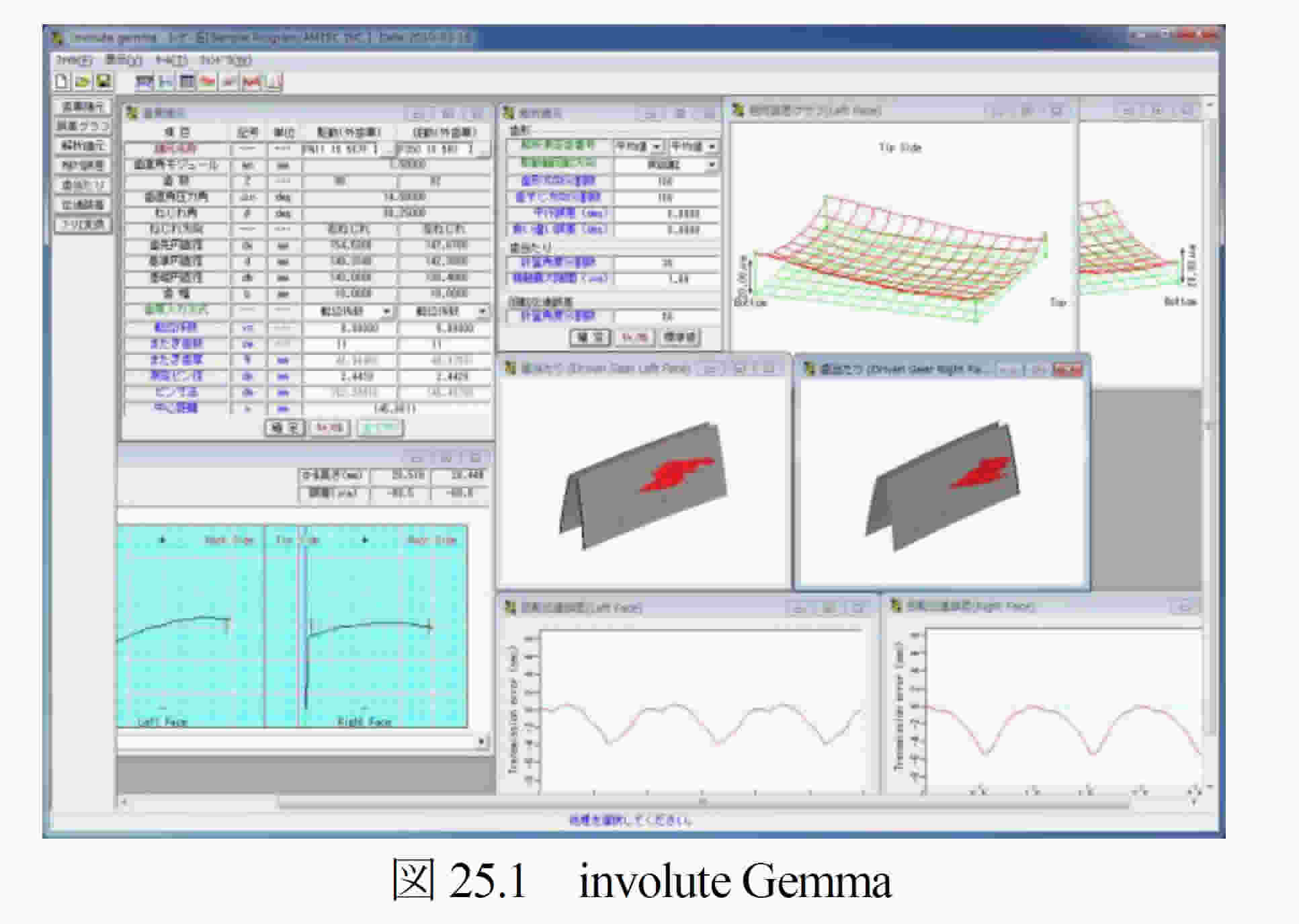
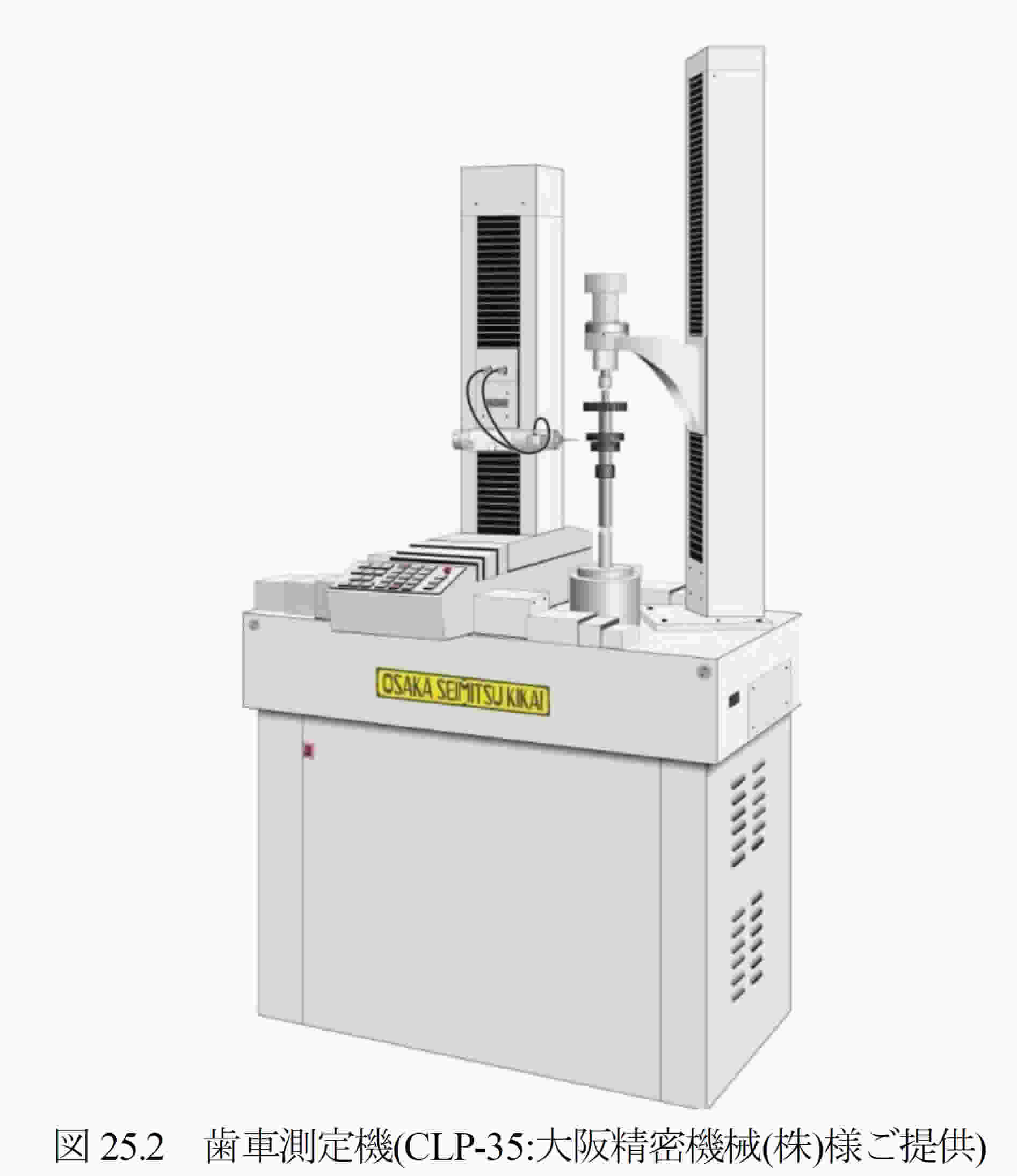
25.1概要
involute Gemmaは,大阪精密機械㈱様の歯車測定機CLP-35/65,GC-1HP)で測定した実データを使用して歯形相対誤差,歯当たり,回転伝達誤差をシミュレートすることができるソフトウェアです. 図25.1にinvolute Gemmaの画面を,図25.2にCLP-35の写真を示します.
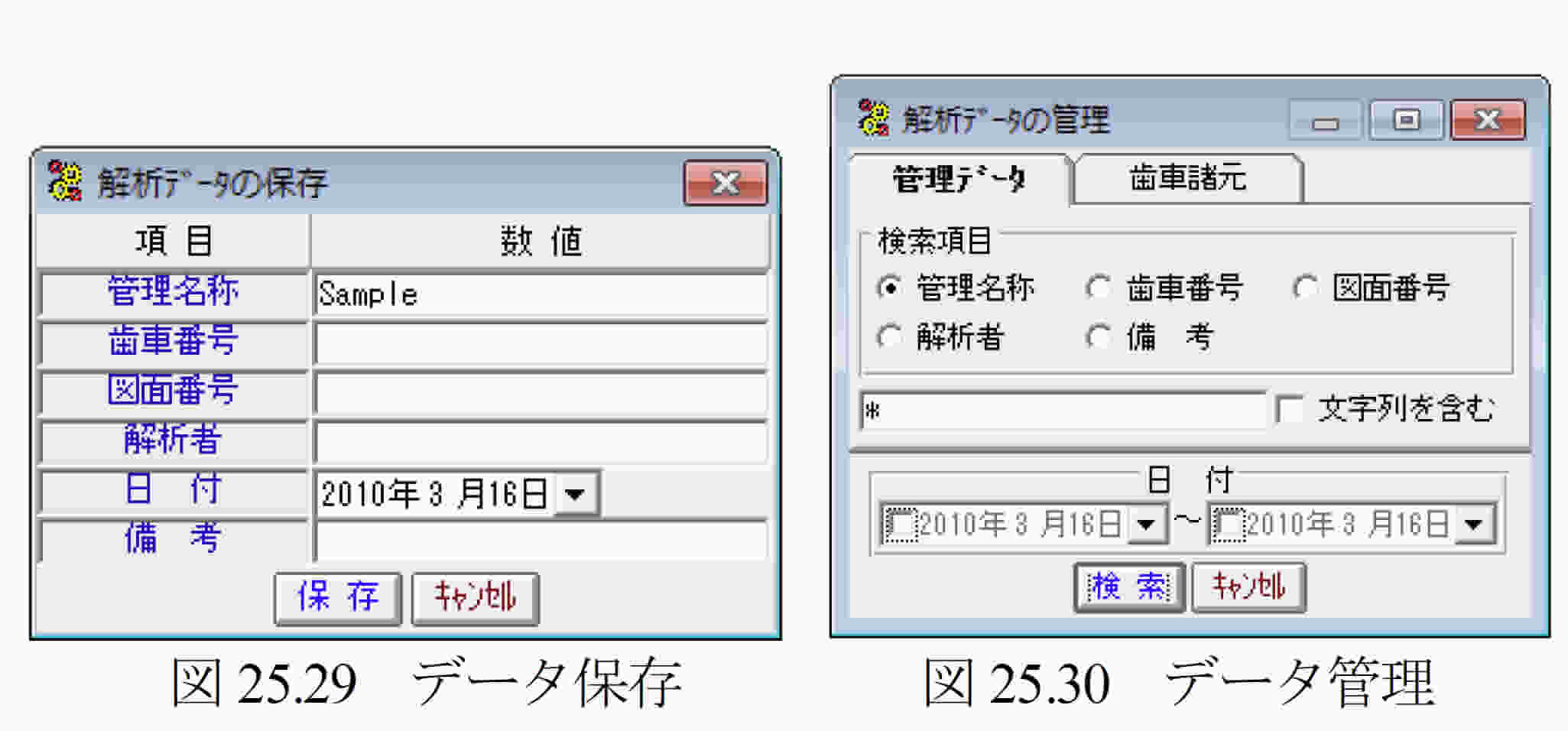
25.2歯車諸元設定
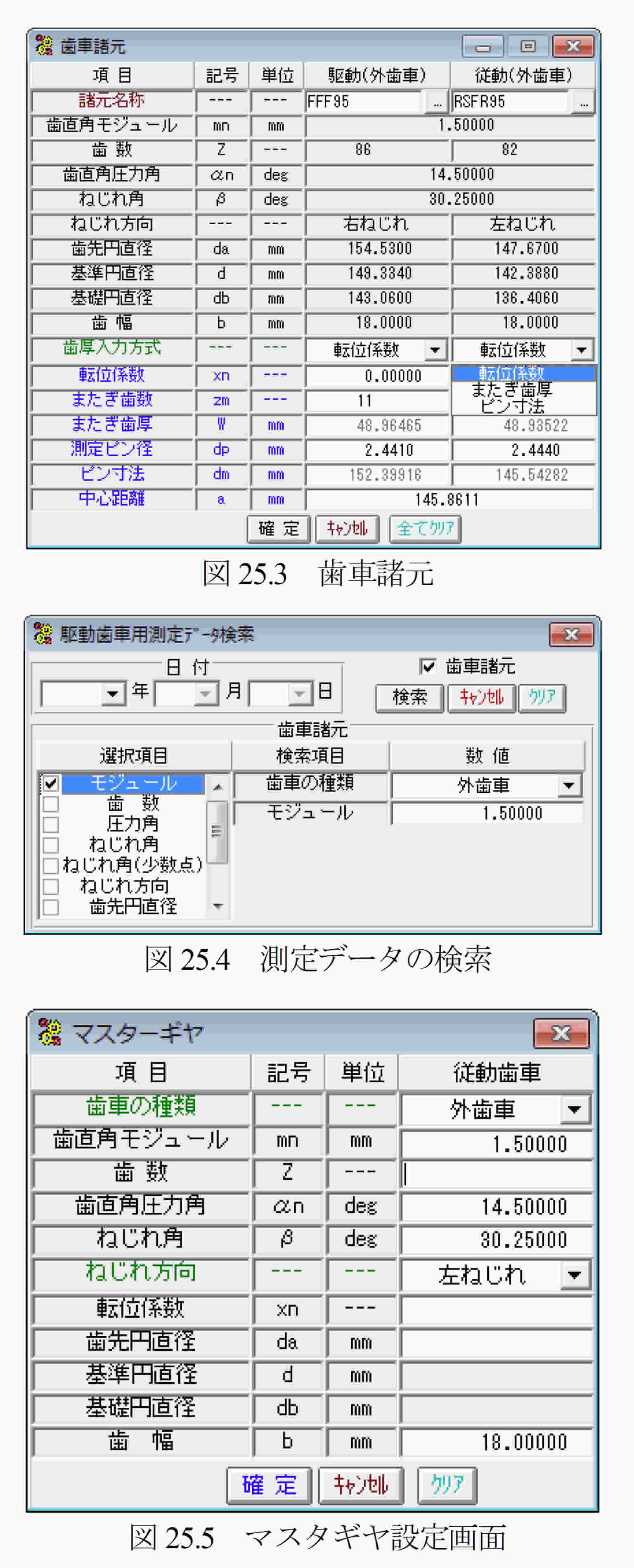
歯車諸元は,図25.4の測定データ検索画面から選択します.検索項目は,日付,歯車の種類(外歯車,内歯車),モジュール,歯数,圧力角,歯幅などを検索することができます.駆動歯車と従動歯車の両歯車を選択して歯車諸元を確定することができますが,歯厚と中心距離は任意に変更することができます.歯厚は,転位係数,またぎ歯厚,オーバーピン寸法から選択して入力することができます.
図25.5に示すように従動歯車に理論歯車を設定することにより理論歯車とのかみ合いシミュレーションも可能です.
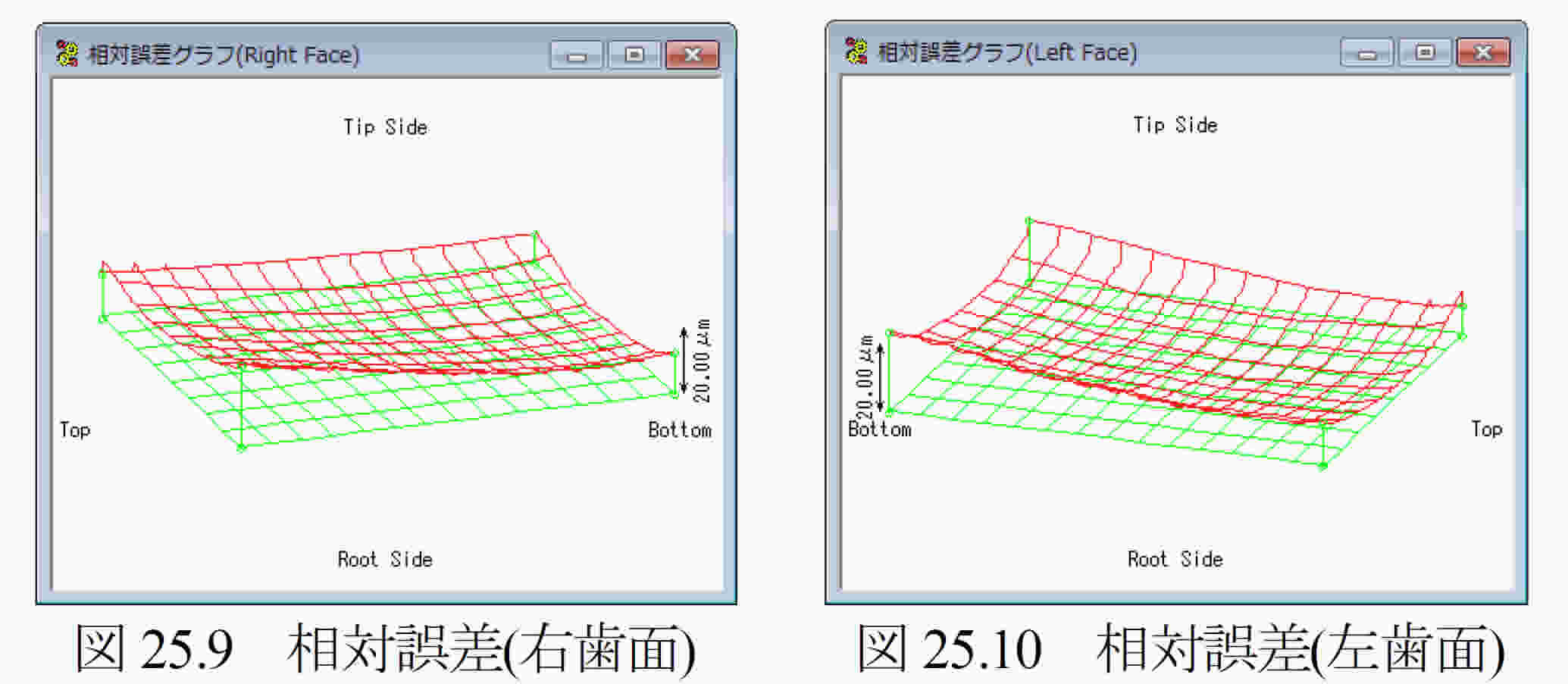
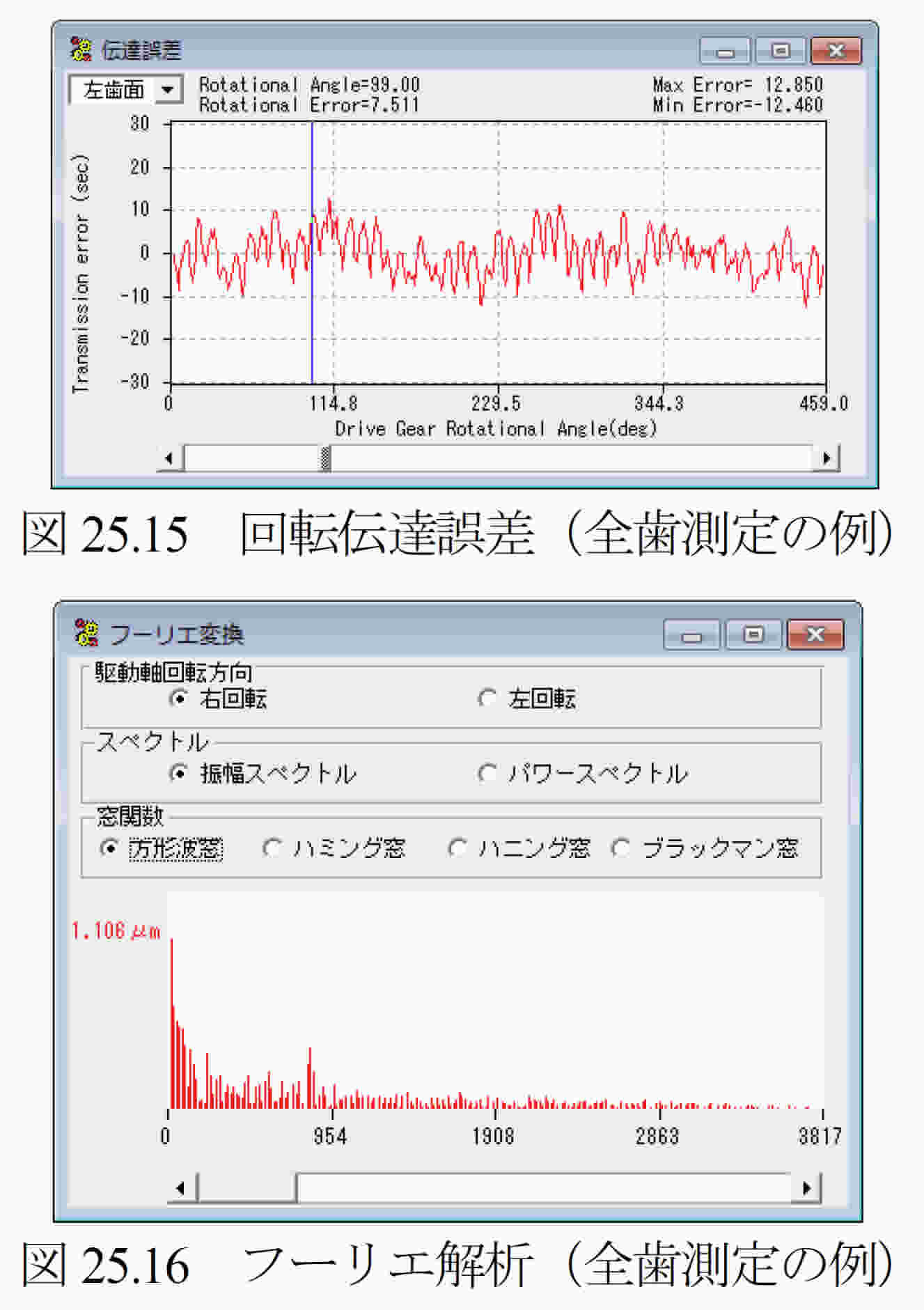
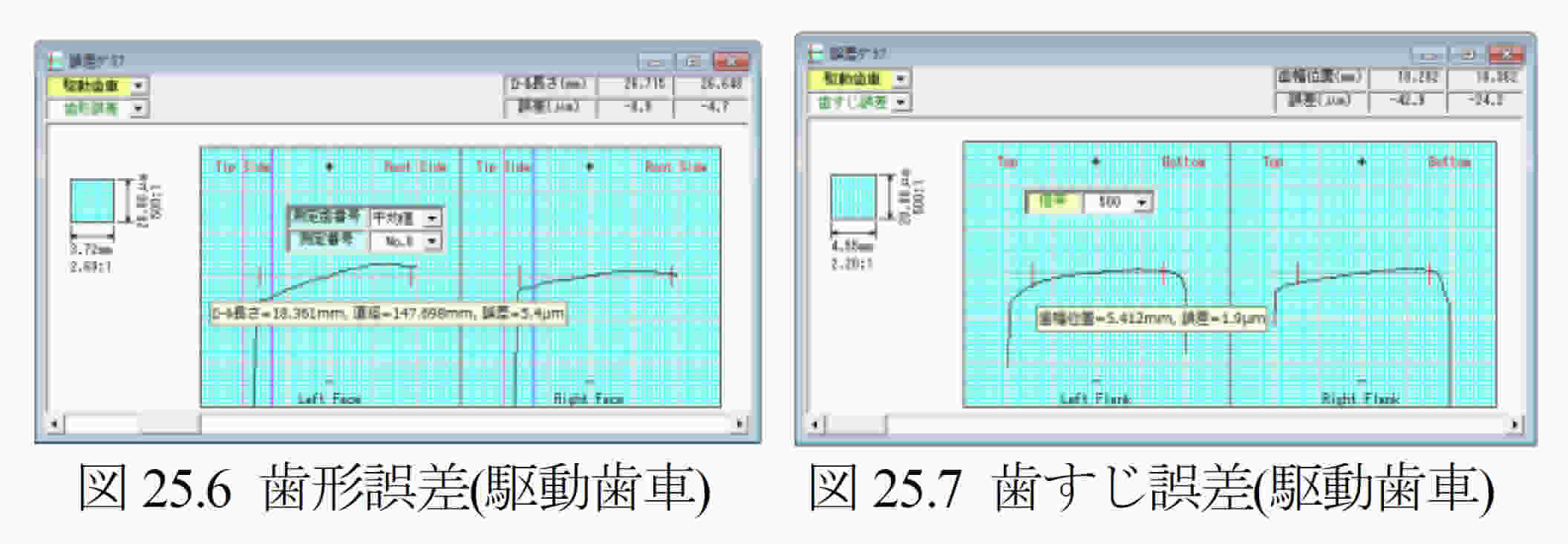
25.3誤差グラフ
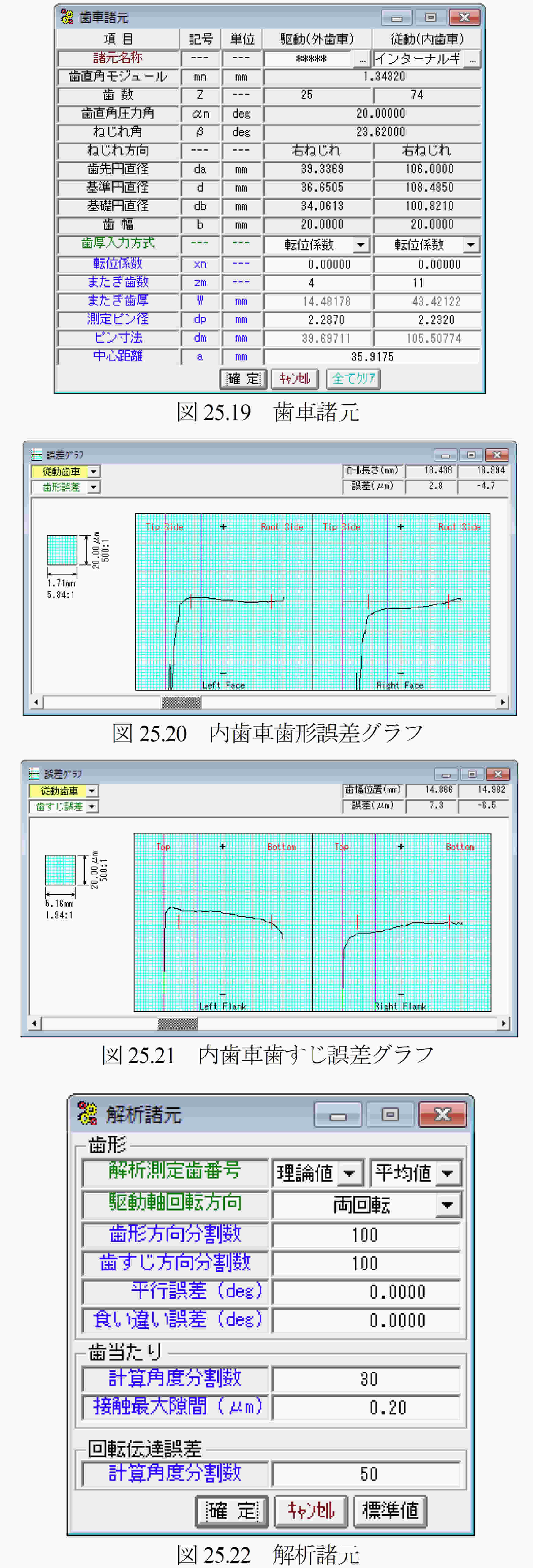
図25.3の「諸元名称」で読み込んだ歯形測定データ(歯形誤差,歯すじ誤差)をグラフで表示することができます.誤差倍率も任意に拡大することができ,測定番号を各々表示することができます.また,グラフ線上にマウスを置くと作用線長さ,直径,誤差を表示します.
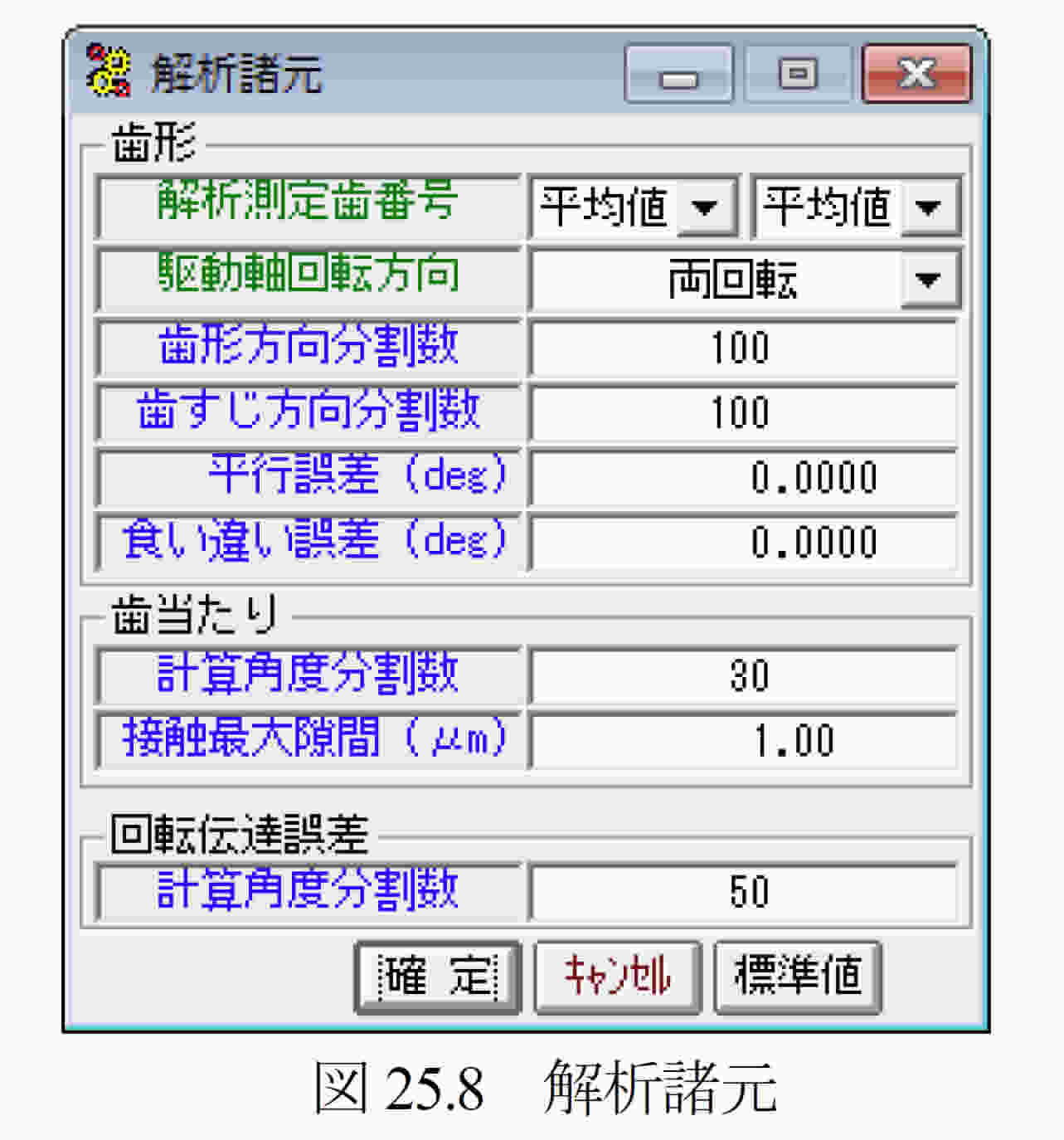
25.4解析諸元
シミュレーションをする際に必要な解析諸元を図25.8で設定します.例題の場合,解析測定歯番号は平均値を使用し,駆動軸回転方向は,両回転,右回転,左回転の内,両回転を選択します.
AMTEC www.amtecinc.co.jp